How does Rhino actually works?
He Attac:
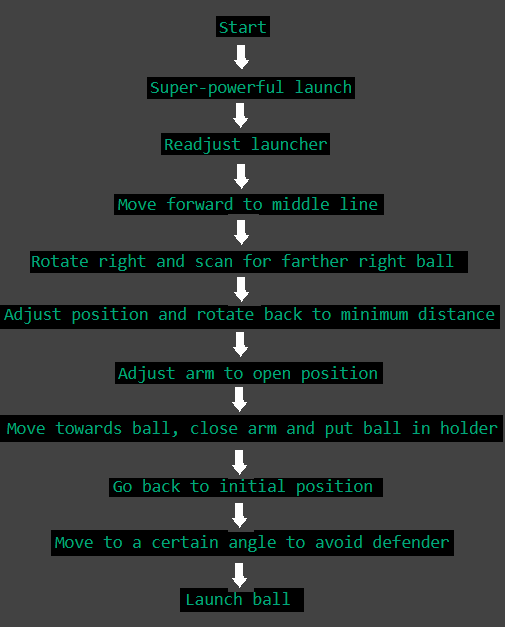
- The Robot has a super-powerful launching mechanism(Thanks to the hidden rubberband) which throws the first ball directly into the basket.
- We readjust the launcher to the initial position.
- The robot moves forward straight till it reaches near the middle line, for this we manually added the time till which motor is on
- The robot rotates right and starts to scan for farther right ball while rotating left and adjust its position(it does that by moving by a small angle and calculates the distance using the ultrasonic sensor. Finally it rotate back to the minimum distance)
- Then it adjusts its arm to the open position, our arm is engineered in a such way that only one motor is responsible for both, closing the arm and lifting the ball to put in the ball holder.
- Then the robot moves towards the ball (till value of ultrasonic sensor less than 50), closes the arm and also put the ball on the holder
- Since we have made the mechanism such that it throws from the initial position, we use the information such as distance traveled and angle moved to go back to the initial position.
- We move to a certain angle (say 10 degrees) to avoid the defender if he is facing us straight and launch the ball.
- We readjust the launcher and the arm to the initial position.
- For the farther left ball, We do the step 3, but we rotate left and scan right and repeat the same steps till launching.
- For the nearest right ball, We do the step 2, but we do not move till the middle line, we move around 25cm. Then we repeat all the previous step till launching.
- For the nearest left ball, We do the step 11, then we turn left and scan right and do the same steps till launching.
He Protec:
- We figured that huge penalties are associated with defenders crossing the lines, since the movement is sometimes unpredictable, we thought of keeping it as simple as posible.
- So, we decided two ways
- Rotate indefinately in the same position, since our compass sensor was placed high, we thought that it might stop attacks on the middle basket
- Move to the left basket and allign parallel to the fence, we thought it will block atleast one basket, reducing the probablilty to 50%
FLOWCHART: Shoot the farther right ball